Python interface for automating test, calibration and data acquisition for embedded control systems.
Automate test, calibration and data acquisition for ECUs
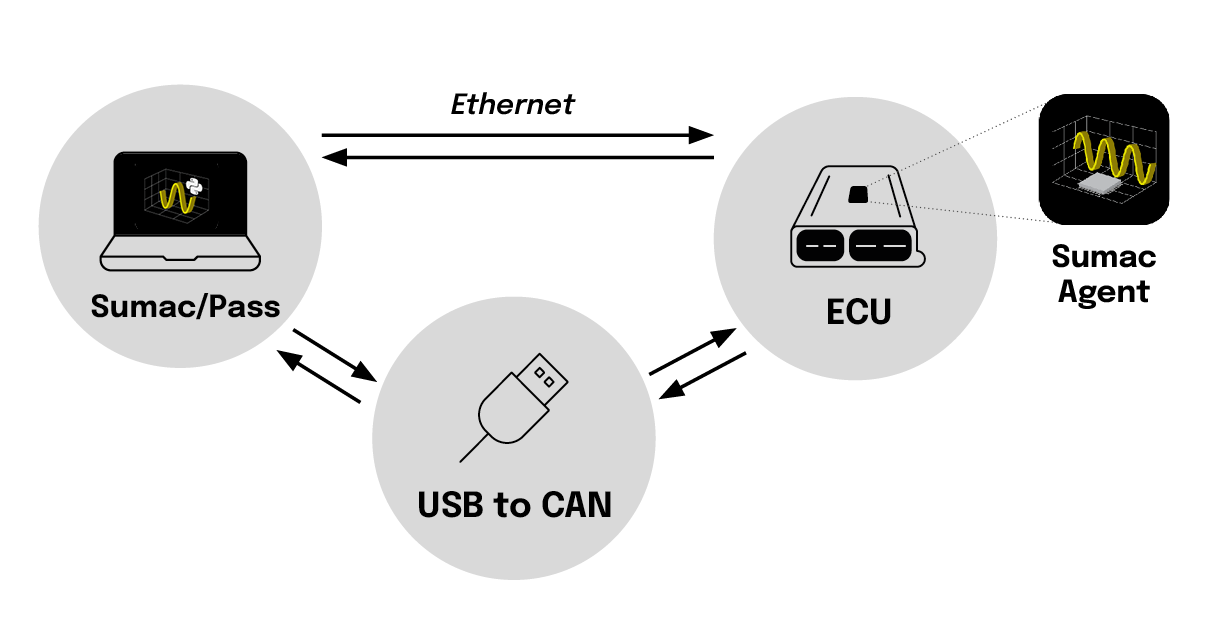
Pass is a python interface for calibration and data acquisition of embedded control systems via XCP.
Pass is ideal to automate tasks such as calibration, measurement, test and validation. In a nutshell – everything which can be done manually with Sumac can be automated with Pass.
It is straightforward to integrate Pass in existing test frameworks such as for example Robot Framework.
Advantages of Pass
Ideal for automating calibration, measurement test and validation for embedded control systems from Python.
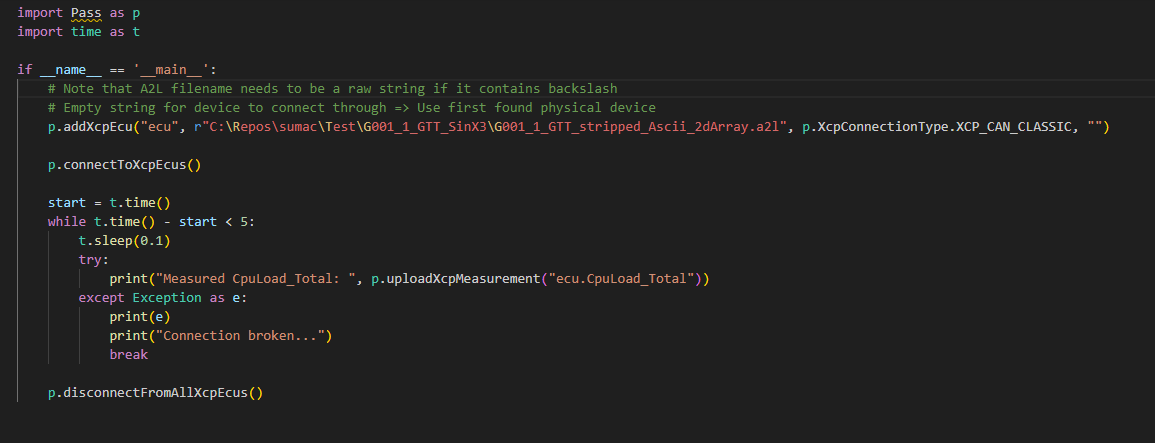
Measurement and Calibration via XCP over CAN, CAN FD and UDP/IP.
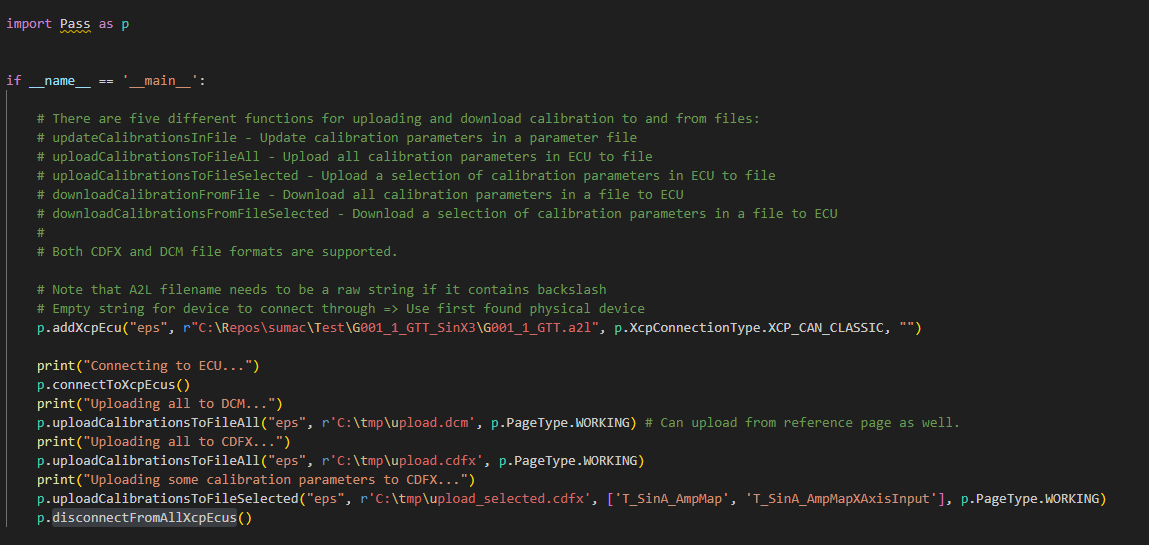
Apply calibration datasets.
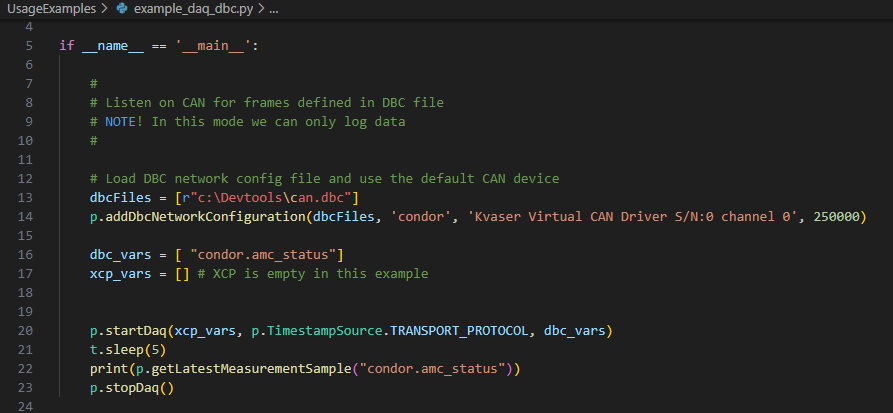
Stored recordings can be loaded and analyzed from Python.
Straightforward to integrate in existing test frameworks.
For CAN a CAN device is required. Sumac supports ETAS, Kvaser and PEAK-System and Vector CAN devices.
We are an authorized distributor for Kvaser and can therefore deliver complete measurement solutions including both software and hardware. From Kvaser we recommend the Semipro or Pro series. Note that we do not recommend the any of Light variants from Kvaser due to their limited capacity to handle high bus loads.
ASAP2 (.A2L) file required for XCP. See Acam toolsuite for A2L creation and management.
ECU with XCP 1.0 or later support (for real-time operation only).
Note! Pass for Linux uses a small auxiliary program to configure socketcan interfaces, socketcantool. socketcantool must have sufficient privileges. Grant them with $ sudo setcap cap_net_admin=eip /path/to/socketcantool. socketcantool will be installed next to the pass .so file in your site-packages folder hierarchy.
If you’re interested in builds for MacOS need a build for a different Python version – contact us!
Sumac for Windows needs Microsoft Visual Studio Redistributable. Download and install vc_redist.x64.exe if it isn’t already installed.
CAN device drivers
Due to the large number of CAN device vendors supported Sumac doesn’t come bundled with CAN device drivers. Below follows links to the drivers for each supported CAN device vendor.
ETAS First the driver for the device itself is needed. The download is a package called Hardware Service Pack. Install this first and then install the driver for your specific device from within Hardware Service Pack.
An addition, the BOA integration package from ETAS is required. During installation choose the 64-bit version since Sumac is a 64-bit exe. The path to the DLLs in the BOA integration package must be manually added to the system PATH. Default folder for these DLLs is C:\Program Files\ETAS\BOA_V2\Bin\x64\Dll\Framework